# Exercises
Below you can find some recap exercises.
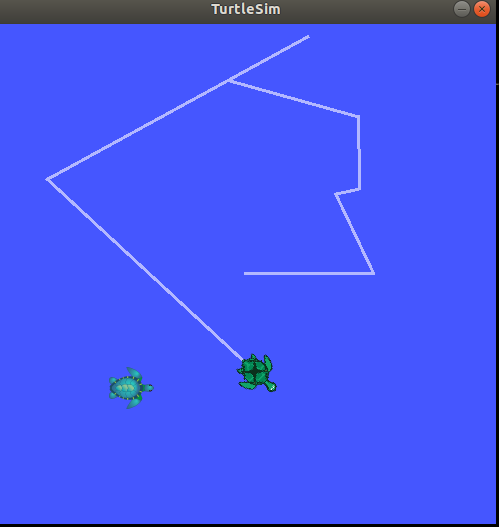
But first try to add a new turtle. You don't have to stop the rosnode turtlesim.
An additional turtle can be spawn with a service parameter /spawn
The info of the ros parameter can be looked up with:
rosservice call /spawn info
Output
Node: /turtlesim
URI: rosrpc://127.0.0.1:49803
Type: turtlesim/Spawn
Args: x y theta name
2
3
4
With example command a second turtle will be spawn.
rosservice call /spawn 3 3 0 turtle2
To delete a turtle the command below can be used:
rosservice call /kill "name: 'turtle2'"
WARNING
It isn't possible to move the second turtle with the turtle_teleop_key.
# Exercise 1
Try to move the second turtle to position -2 -2 1 (x y theta) by terminal
Solution Exercise 1
rosservice call /turtle1/teleport_absolute 2 2 0
# Exercise 2
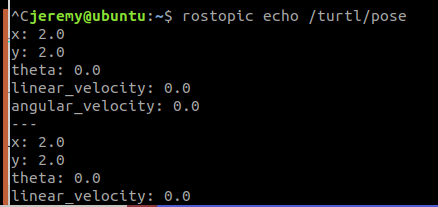
Try to read out the current position of the second turtle by terminal
Solution Exercise 2
rostopic echo /turtle2/pose
# Exercise 3
Try to control the turtle by command (cmd_vel) to used updaterate should be 10ms by terminal
Solution Exercise 3
rostopic pub /turtle2/cmd_vel geometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
rostopic pub /turtle2/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0" -r 10
2
3
4
5
6
7
8
9
10
# Exercise 4
Try to visualise the current position in rqt_plot by terminal
Solution Exercise 4
rqt_plot -e /turtle2/pose/x:y:z
# Exercise 5
Try to find the update rate of cmd_vel of the second turtle by terminal
Solution Exercise 5
rostopic hz /turtle2/cmd_vel
# Exercise 6
Try to change the color of the pen set by the turtle on the screen.
TIP
check the rosservice list
Solution Exercise 6
rosservice list
rosservice info /turtle2/set_pen
rosservice call /turtle2/set_pen 125 125 125 2 0
2
3